Detección y localización de productos mediante sensores ultrasónicos
Colaboración de Editores de DigiKey de América del Norte
2022-01-18
La maquinaria agrícola, las operaciones logísticas, los sistemas de manipulación de materiales y los equipos de procesamiento industrial son algunas de las aplicaciones que exigen una detección de elementos y unas mediciones de distancia cada vez más precisas. A menudo, los objetos pueden variar de color, ser brillantes o tener superficies transparentes, lo que dificulta la detección precisa y las mediciones de alcance. Las condiciones adversas, como el polvo, la suciedad, la niebla y las temperaturas de funcionamiento de hasta +70 °C, pueden presentar más obstáculos para la detección precisa de elementos y la medición de distancias. La superficie sobre la que deben actuar los sensores puede variar desde unos pocos milímetros (mm) hasta varios metros, tanto en la anchura de la zona de detección como en la distancia al objeto. La disponibilidad de salidas analógicas y digitales, además de la programabilidad de la medición, es a menudo necesaria para soportar implementaciones de sistemas flexibles. Los sensores ultrasónicos pueden utilizarse para satisfacer todas estas necesidades de aplicación.
Este artículo examina las características de funcionamiento de los sensores ultrasónicos y cómo utilizarlos en aplicaciones de identificación de artículos y medición de distancias. El artículo describirá los modos de funcionamiento ajustables, incluidos el modo de punto de conmutación (DtO), el modo de ventana de conmutación (Wnd) y el modo de objeto entre el sensor y el fondo (ObSB). A continuación, se presentarán las opciones de sincronización de hasta 50 sensores frente a la multiplexación de hasta 50 sensores, se compararán los filtros de medición ajustables y la conformación del haz de sonido, y se cerrará con ejemplos de sensores ultrasónicos de SICK que ofrecen distintos rangos, velocidades de medición y combinaciones de salidas analógicas y digitales.
Un sensor ultrasónico emite un pulso acústico de alta frecuencia (normalmente desde unos 80 kHz hasta varios cientos de kHz) que se refleja en el objeto detectado (figura 1). El sensor mide el tiempo de ida y vuelta necesario para que el pulso de energía acústica se desplace desde el sensor hasta el objeto y de vuelta. La electrónica interna calcula la distancia al objeto multiplicando la velocidad del sonido por el tiempo total de viaje dividido por 2. El cálculo de la distancia incluye la compensación de la temperatura (la velocidad del sonido varía con la temperatura) para garantizar la precisión de las mediciones. Además, la medición proporciona una detección de objetos y una medición de alcance independientes del color, además de la inmunidad a contaminantes como la suciedad, el polvo, la humedad y la niebla.
 Figura 1: Medición de la distancia del sensor ultrasónico; Distancia = velocidad del sonido compensada por la temperatura x tiempo total de vuelo acústico (t2) / 2. (Fuente de la imagen: SICK)
Figura 1: Medición de la distancia del sensor ultrasónico; Distancia = velocidad del sonido compensada por la temperatura x tiempo total de vuelo acústico (t2) / 2. (Fuente de la imagen: SICK)
Los sensores ultrasónicos pueden detectar superficies de color, brillantes o transparentes que pueden ser un reto para las tecnologías de sensores ópticos. Pueden utilizarse para detectar materiales sólidos, en polvo o líquidos, por lo que son útiles en una amplia gama de aplicaciones. Los materiales menos absorbentes del sonido pueden detectarse a mayor distancia con un sensor determinado. En condiciones óptimas, con un objeto fácilmente detectable, un sensor ultrasónico puede utilizarse hasta su "rango límite" (figura 2). La sensibilidad y el alcance de detección de un sensor dependen de la reflectividad acústica, el tamaño y la alineación del objeto que se quiere detectar. En algunos casos, los sensores acústicos pueden detectar objetos muy pequeños, como cables metálicos. Los sensores ultrasónicos son muy versátiles y se utilizan en diversas aplicaciones, entre ellas:
- Control del nivel de llenado
- Detección de diferentes tipos de objetos
- Prevención de colisiones
- Identificación de los contenedores vacíos
- Detección de desgarros
- Control del diámetro
- Posicionamiento de objetos
- Medidas dimensionales
 Figura 2: El rango de exploración del sensor ultrasónico aumenta para objetos más grandes, como la placa alineada (arriba) frente a una tubería (abajo). Cuanto menos sonido absorba el objeto a medir, mayor será el rango de detección posible, hasta el rango límite. (Fuente de la imagen: SICK)
Figura 2: El rango de exploración del sensor ultrasónico aumenta para objetos más grandes, como la placa alineada (arriba) frente a una tubería (abajo). Cuanto menos sonido absorba el objeto a medir, mayor será el rango de detección posible, hasta el rango límite. (Fuente de la imagen: SICK)
Modos de operación
Existen varios modos de funcionamiento para sensores ultrasónicos individuales y grupos de sensores. El sensor individual puede utilizarse en tres modos básicos:
- El modo más sencillo es el de distancia al objeto (DtO) (a veces denominado "punto de conmutación simple" o "sensor en el objeto"). En DtO, la detección y la distancia al objeto se transmiten tan pronto como el objeto está dentro del alcance.
- El modo ventana (Wnd) es una extensión de DtO en la que la detección de un objeto solo se produce cuando éste se encuentra dentro de una distancia definida (la "ventana").
- El modo Objeto entre el sensor y el fondo (ObSB) enseña al sensor un fondo de referencia, y el sensor detecta entonces cualquier objeto que oscurezca el fondo. Por ejemplo, el ObSB puede detectar objetos planos (como sobres) en una cinta transportadora.
Filtrar y ajustar el funcionamiento del sensor
Además de seleccionar el modo de funcionamiento necesario, los sensores ultrasónicos pueden multiplexarse, sincronizarse y filtrarse, y el propio cono de sonido puede ajustarse (figura 4). El filtrado puede utilizarse para ajustar la sensibilidad de la medición. Cuanto mayor sea el nivel de filtrado, mayor será la capacidad de detectar objetos pequeños o de forma irregular. Los niveles más bajos de filtrado pueden mejorar la capacidad de detectar objetos en movimiento rápido.
La frecuencia de conmutación mide la frecuencia de encendido y apagado de un sensor ultrasónico por segundo. Las frecuencias de conmutación pueden variar, con valores típicos de 1 a 25 Hz. La histéresis mide la diferencia entre el punto de conmutación y el punto de reposición y suele ajustarse a los requisitos de una aplicación específica.
Algunas aplicaciones requieren el uso de múltiples sensores, por ejemplo, para cubrir un área de detección más amplia que la que puede manejarse con un solo sensor. La diafonía entre los sensores puede dar lugar a datos espurios y debe ser controlada. Por ejemplo, si un sensor capta la señal de otro, puede dar lugar a la "detección" de un objeto que no existe. El uso de conos sonoros ajustables junto con la multiplexación y la sincronización puede controlar la diafonía en aplicaciones de sensores múltiples.
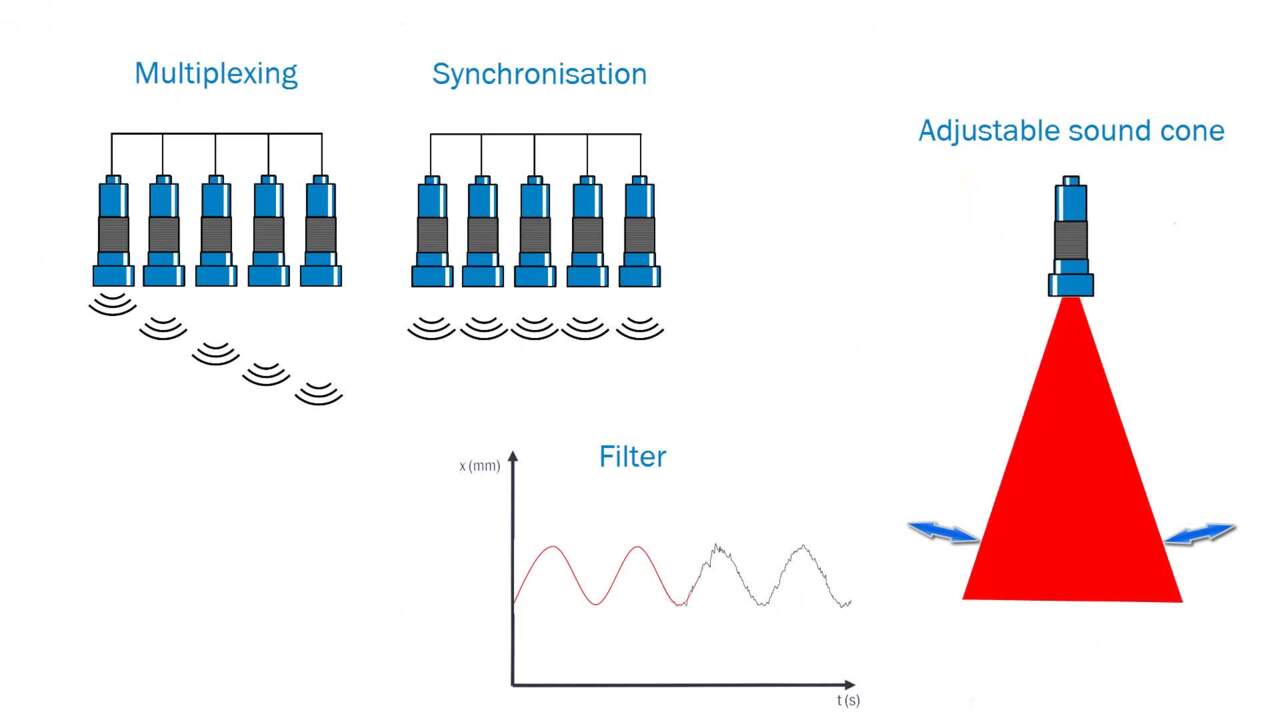
 Figura 3: Las características del sensor ultrasónico incluyen la multiplexación o sincronización de varios sensores (arriba a la izquierda), conos de sonido ajustables (derecha) y filtrado de valores medios (centro abajo). (Fuente de la imagen: DigiKey).
Figura 3: Las características del sensor ultrasónico incluyen la multiplexación o sincronización de varios sensores (arriba a la izquierda), conos de sonido ajustables (derecha) y filtrado de valores medios (centro abajo). (Fuente de la imagen: DigiKey).
La sincronización de los sensores elimina la diafonía al conmutar todos los sensores simultáneamente, lo que elimina la posibilidad de que se produzcan errores por la variación de la sincronización de los sensores. También reduce la posibilidad de que se produzcan interferencias entre los sensores. La sincronización puede permitir que los sensores se monten más cerca. El uso de múltiples sensores puede aumentar el tamaño de la zona de detección.
Mientras que los sensores sincronizados pueden utilizarse para controlar cualquier objeto u objetos en un área definida, los sensores multiplexados pueden utilizarse para medir las dimensiones de un objeto (Figura 4). Los sensores multiplexados se conmutan de forma asíncrona, realizando mediciones alternas. La multiplexación de los sensores puede admitir distancias de montaje muy pequeñas entre los sensores, manteniendo la capacidad de realizar mediciones independientes sin diafonía. El funcionamiento asíncrono de los sensores aumenta el tiempo de respuesta de los sistemas de sensores multiplexados. En algunas aplicaciones, es posible utilizar sensores sincronizados sin dejar de controlar la diafonía, logrando un tiempo de respuesta del sistema más rápido que la multiplexación.
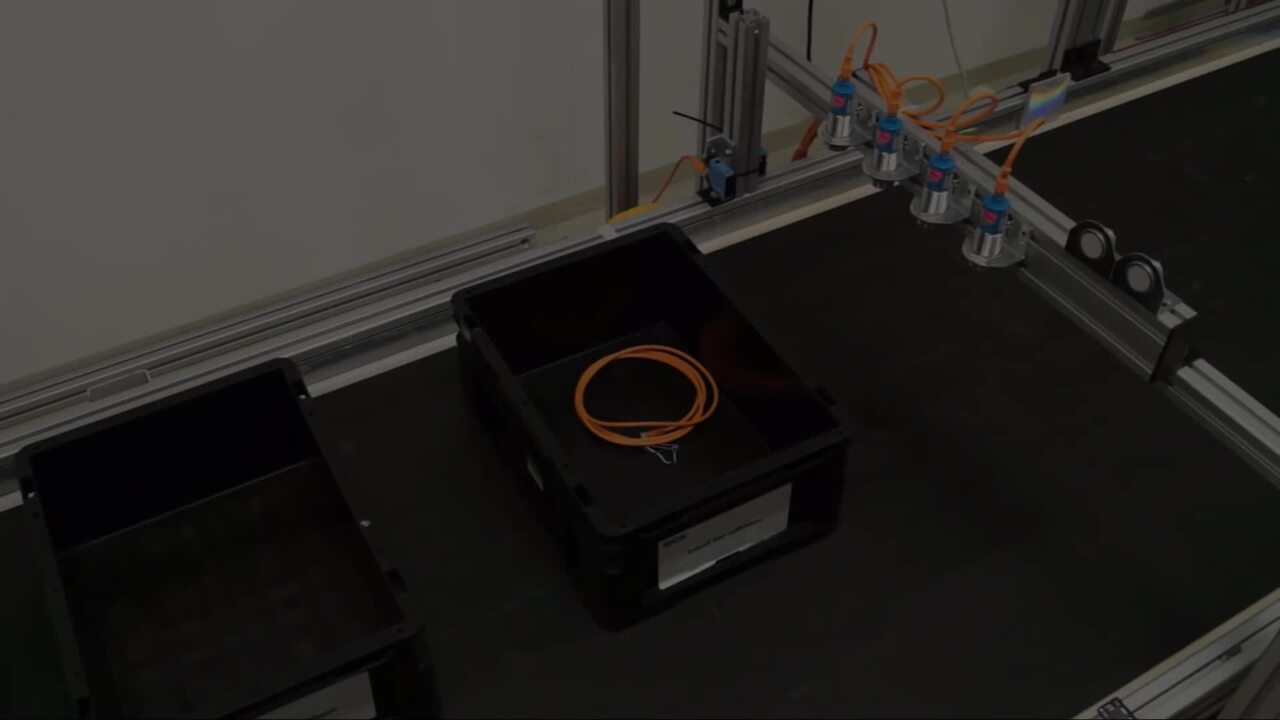
 Figura 4: Los sensores multiplexados pueden utilizarse para medir las dimensiones de un objeto (izquierda). Los sensores sincronizados pueden vigilar cualquier objeto u objetos que puedan estar en una zona definida (derecha). (Fuente de la imagen: SICK)
Figura 4: Los sensores multiplexados pueden utilizarse para medir las dimensiones de un objeto (izquierda). Los sensores sincronizados pueden vigilar cualquier objeto u objetos que puedan estar en una zona definida (derecha). (Fuente de la imagen: SICK)
Sensores ultrasónicos UM30
La familia de sensores ultrasónicos UM30 admite todos los filtrados, modos de funcionamiento y ajustes descritos anteriormente. Para aplicaciones que necesitan rangos de detección de 30 milímetros (mm) a 250 mm, el modelo UM30-211111 ofrece una salida digital. En cambio, el UM30-211118 permite elegir entre una salida digital o analógica y, al igual que todos los sensores UM30, estas unidades cuentan con una pantalla LCD que permite realizar ajustes rápidos y flexibles del sensor (figura 5). Estos sensores ultrasónicos tienen una frecuencia de conmutación rápida de 25 Hertz (Hz) con un tiempo de salida de 8 milisegundos (ms) y un tiempo de respuesta de 32 ms. Tienen una frecuencia ultrasónica típica de 320 kHz.
 Figura 5: El modelo UM30-211111 ofrece una salida digital, mientras que el UM30-211118 permite elegir entre una salida digital o analógica. Ambas cuentan con una pantalla LCD (arriba a la izquierda en el sensor) para un ajuste rápido y flexible del sensor y un rango de detección de 30 mm a 250 mm. (Imagen: DigiKey)
Figura 5: El modelo UM30-211111 ofrece una salida digital, mientras que el UM30-211118 permite elegir entre una salida digital o analógica. Ambas cuentan con una pantalla LCD (arriba a la izquierda en el sensor) para un ajuste rápido y flexible del sensor y un rango de detección de 30 mm a 250 mm. (Imagen: DigiKey)
Hay varios sensores UM30 disponibles con salidas analógicas y/o digitales. Las salidas analógicas cuentan con una selección automática de salida de corriente o tensión analógica en función de la carga. Están disponibles con una salida de 4 mA a 20 mA (carga ≤ 500 Ω) o de 0 a 10 Vcc (carga ≥ 100,000 Ω), con una resolución de 12 bits. Se ofrece una variedad de salidas digitales que incluyen: 1 x PNP, ≤ 200 mA; 1 x NPN, ≤ 200 mA; 2 x PNP, ≤ 200 mA; 2 x NPN, ≤ 200 mA; o un PNP/NPN push-pull con capacidad de ≤ 100 mA.
Las aplicaciones que necesitan rangos de detección más largos, desde 600 mm hasta 8 metros, pueden utilizar el UM30-215113, que ofrece una salida analógica, o el UM30-215118, que ofrece salidas digitales o analógicas. Estos sensores tienen una frecuencia ultrasónica típica de 80 kHz, con una frecuencia de conmutación de 3 Hz, un tiempo de salida de 60 ms y un tiempo de respuesta de 240 ms.
 Figura 6: Las aplicaciones que necesitan rangos de detección de 600 mm a 8 metros pueden utilizar el UM30-215113, que ofrece una salida analógica, o el UM30-215118 que ofrece una opción de salidas digitales o analógicas. (Imagen: DigiKey)
Figura 6: Las aplicaciones que necesitan rangos de detección de 600 mm a 8 metros pueden utilizar el UM30-215113, que ofrece una salida analógica, o el UM30-215118 que ofrece una opción de salidas digitales o analógicas. (Imagen: DigiKey)
Hay sensores UM30 que admiten una amplia variedad de combinaciones de rango de funcionamiento/rango de limitación, tiempo de salida/tiempo de respuesta y frecuencia de conmutación (Tabla 1). Los rangos más cortos se corresponden con tiempos de salida y respuesta más rápidos y frecuencias de conmutación más altas. Los tiempos de respuesta se basan en una salida digital o en una salida analógica sin filtrar. El filtrado y el suavizado de una salida analógica, según la aplicación, pueden aumentar el tiempo de respuesta hasta un 200%.
|
Tabla 1: Comparación del rango de funcionamiento/rango límite, tiempo de salida/tiempo de respuesta y compensaciones de frecuencia de conmutación disponibles con los sensores ultrasónicos UM30. (Fuente de la tabla: SICK)
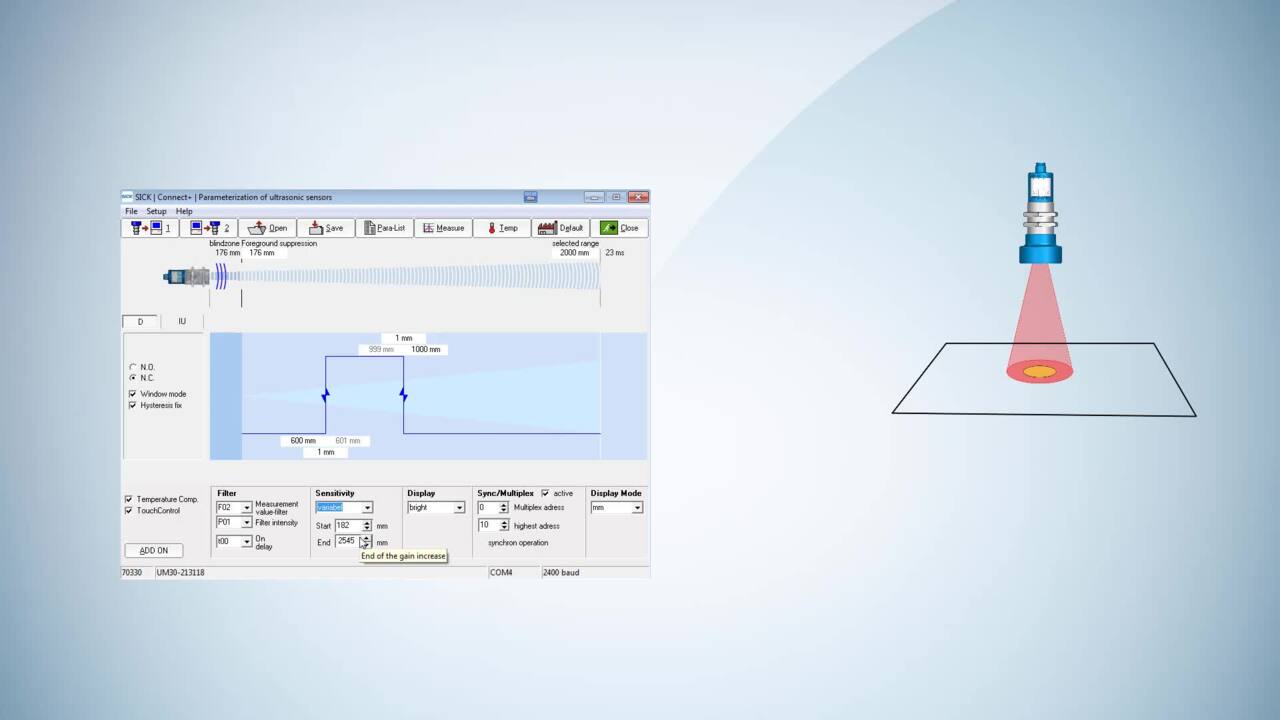
IO-Link simplifica la implantación de sistemas de sensores ultrasónicos.
Mediante IO-Link, el rango de detección de los sensores UM30 puede ajustarse continuamente. El tamaño y la forma del cono de sonido y otros parámetros de detección pueden optimizarse según las necesidades de la aplicación. Algunas de las ventajas de I-O Link son:
- Diagnóstico flexible de los sensores que permite el mantenimiento preventivo
- Mayor disponibilidad de la máquina gracias a la simplificación de la sustitución de los sensores
- Mayor productividad del sistema con comunicaciones integradas a nivel de bus de campo
- Mayor flexibilidad de la aplicación al reconfigurar los sensores en línea a medida que cambian las necesidades del proceso
- Reducción del costo del proyecto gracias al uso de cables sin protección que permiten una transmisión de la señal a prueba de interferencias y una mayor fiabilidad del sistema
Resumen
Los sensores ultrasónicos pueden satisfacer una amplia variedad de necesidades de detección de objetos y medición de distancias, desde 30 mm hasta 8 metros. La familia de sensores ultrasónicos UM30 de SICK admite el filtrado de la salida y numerosos modos de funcionamiento para aumentar la flexibilidad de las aplicaciones. Se pueden multiplexar o sincronizar hasta 50 sensores. El tamaño y la forma del cono de sonido y otros parámetros de detección pueden optimizarse según las necesidades de la aplicación. La conectividad IO-Link integrada aporta mayor flexibilidad, fiabilidad y eficiencia y puede reducir los costos de funcionamiento del sistema.
Descargo de responsabilidad: Las opiniones, creencias y puntos de vista expresados por los autores o participantes del foro de este sitio web no reflejan necesariamente las opiniones, las creencias y los puntos de vista de DigiKey o de las políticas oficiales de DigiKey.